OVERVIEW
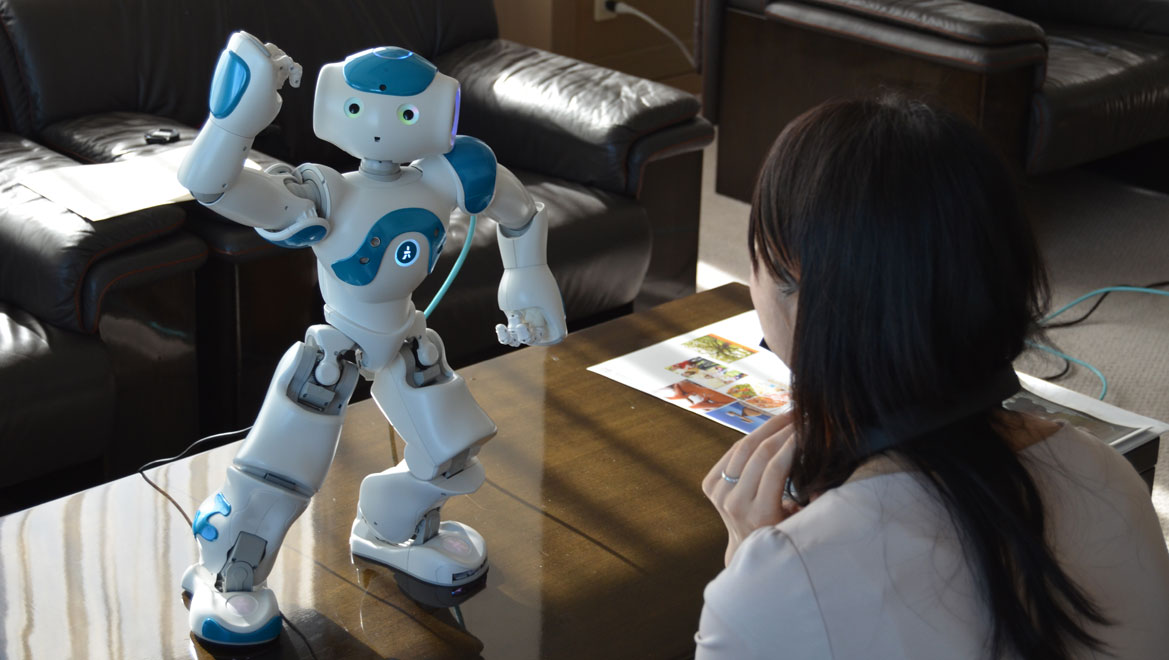
From surgical procedures to robotic arms that assist with eating – the potential of robots and AI in healthcare is enormous. Assistance was sought on the development and testing of robots as companions for ‘healthy living’ – using ‘Nao’ (an autonomous, programmable humanoid robot)
User testing was planned and then executed with participants in Tokyo, Japan – where the client was based. The aim was to find out the kind of role a companion robot could play and the functionalities that would best benefit its user.
MY ROLE
As part of a two person team I was responsible for creating the user test scenarios, conducting the sessions and analyzing our findings.
User Testing Methods
We focused on users that are trying to lose weight, adopt better health habits and maintain a healthy balance. A mix of genders and age groups were selected to collect a broader spectrum of viewpoints.






By sending out activities to participants prior to the face-to-face meetings, we sensitized them to the topic, gathered factual data for the sessions beforehand, and set them easy tasks that added value to the discussions.
The first part of the testing was lifestyle-based and focused on:
- How participants took care of themselves currently (diet, sleep, exercise routine, etc.)
- Their future health goals and driving factors to work towards them
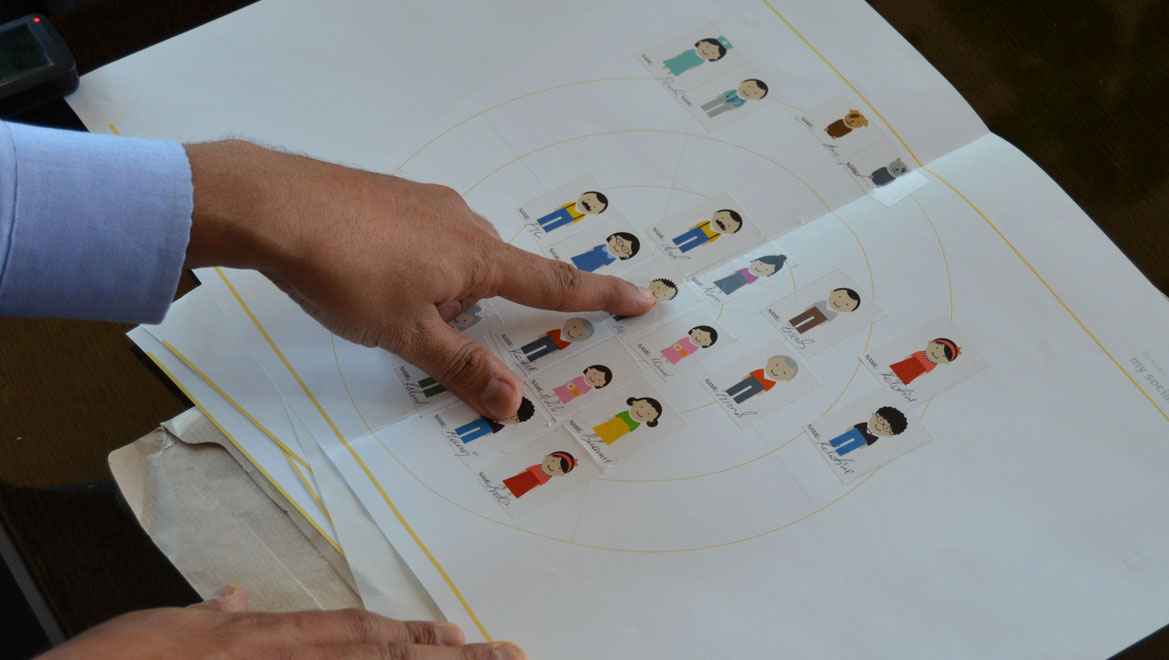
- The role of other people in their lives in relation to their health
Research tools:
- A daily routine planner
- Social network map
- Motivations & challenges activity
- Card- sorting activity on future health goals


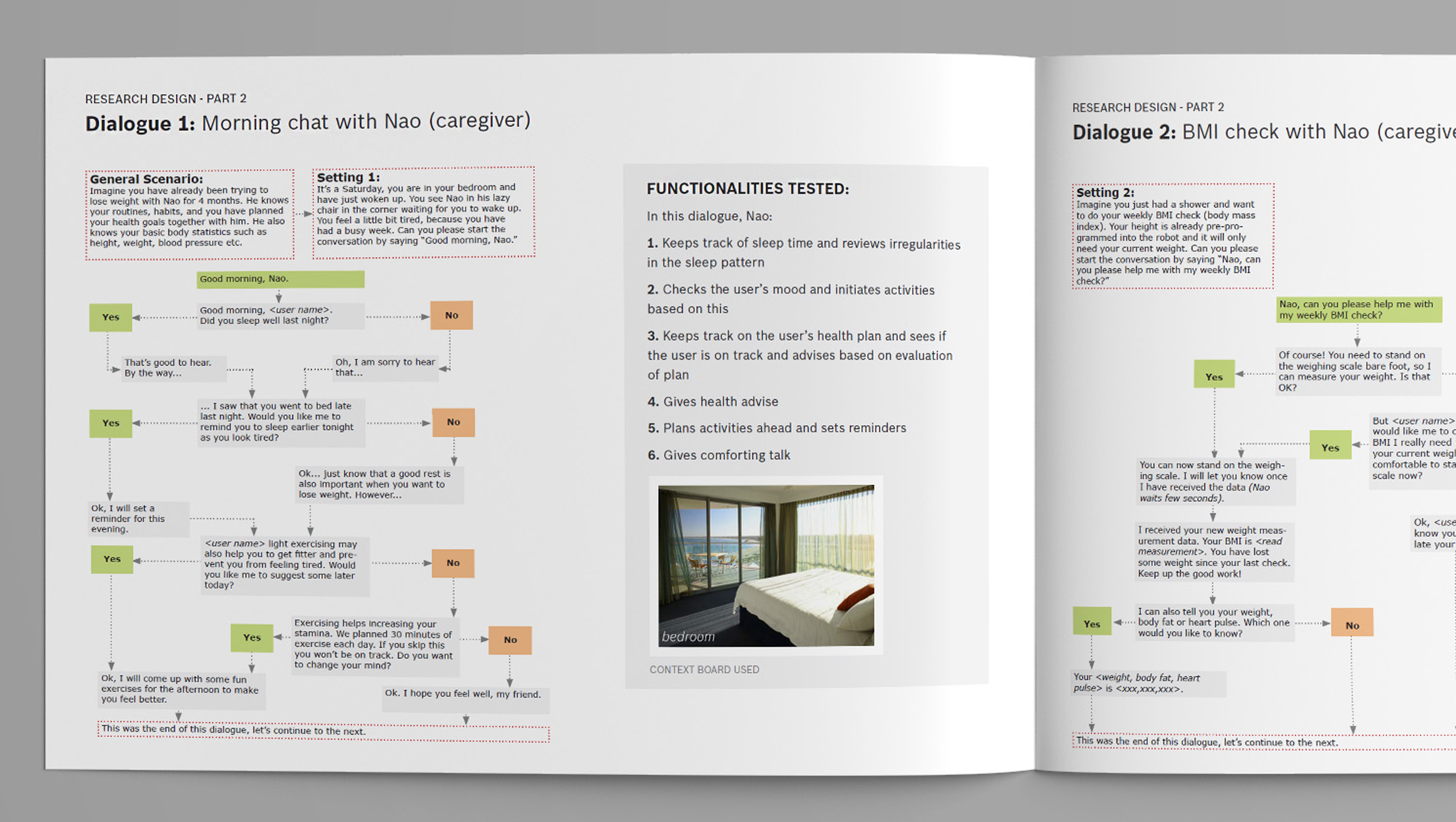
The second part tested the interaction with the robot, focusing on:
- The role or type of companion the robot could emulate
- The functionalities the robot should have
- The areas of the user’s life the companion robot could help affect in order to motivate healthier habits
Research tools:
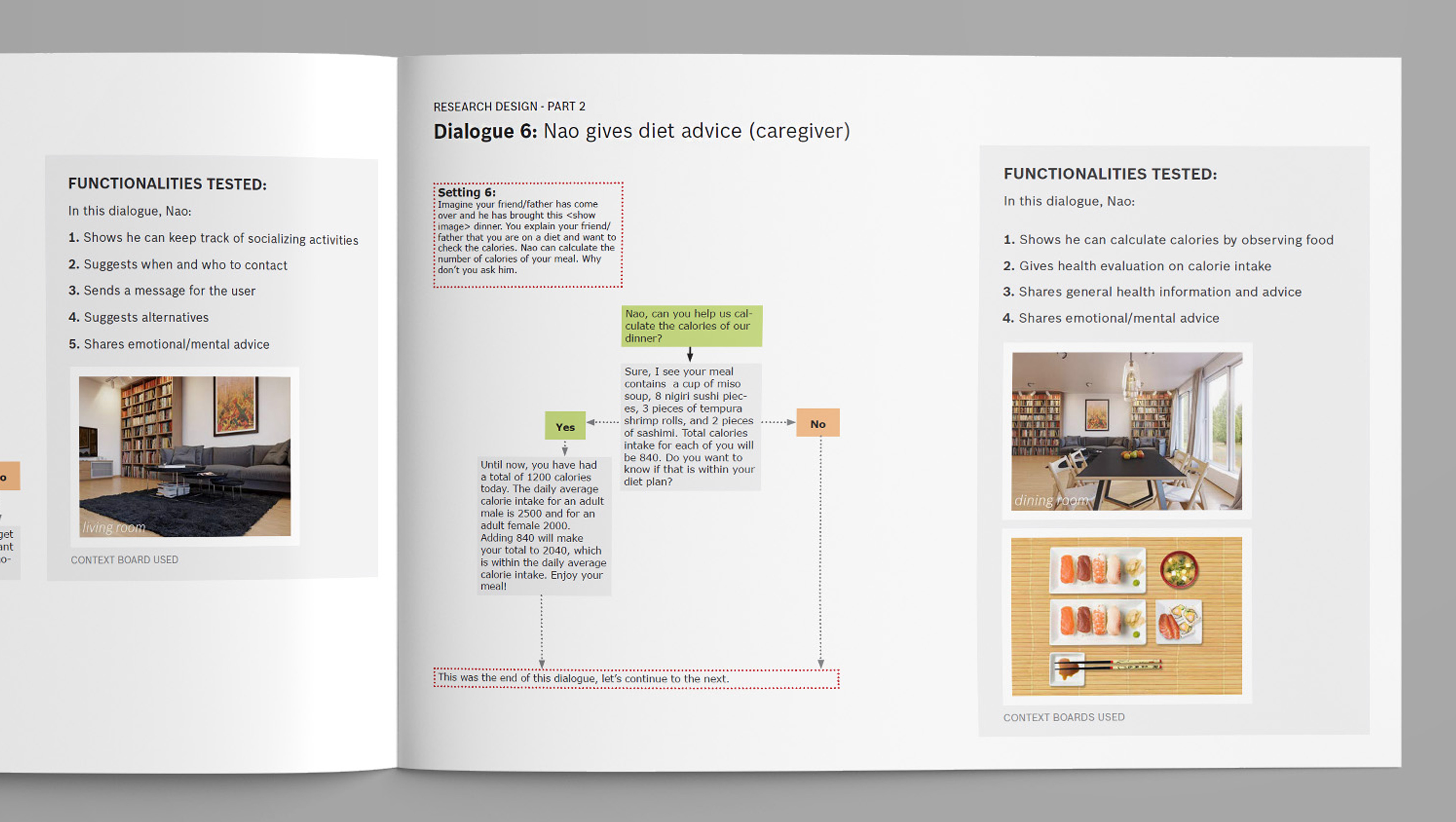
- Interactive scenarios (that test certain functionalities) enacted between the participants and Nao
- Visual cues to help in building the context (e.g. image of a meal)

Top Insights on Lifestyle:
- Better organization in different aspects of life is needed to maintain a healthy work-life balance e.g. social obligations at work
- A desire to spend more time away from the city and do outdoor activities is greatly felt but is missing in the current lifestyle.
- Participants need a push to adopt hobbies and other activities that stimulate them mentally.
- Controlling diet and getting tempted to eat tasty but unhealthy food is seen as the biggest challenge to overcome.
- Family members are considered as caregivers but not motivators to live healthily. Motivators are mostly outside the family circle.
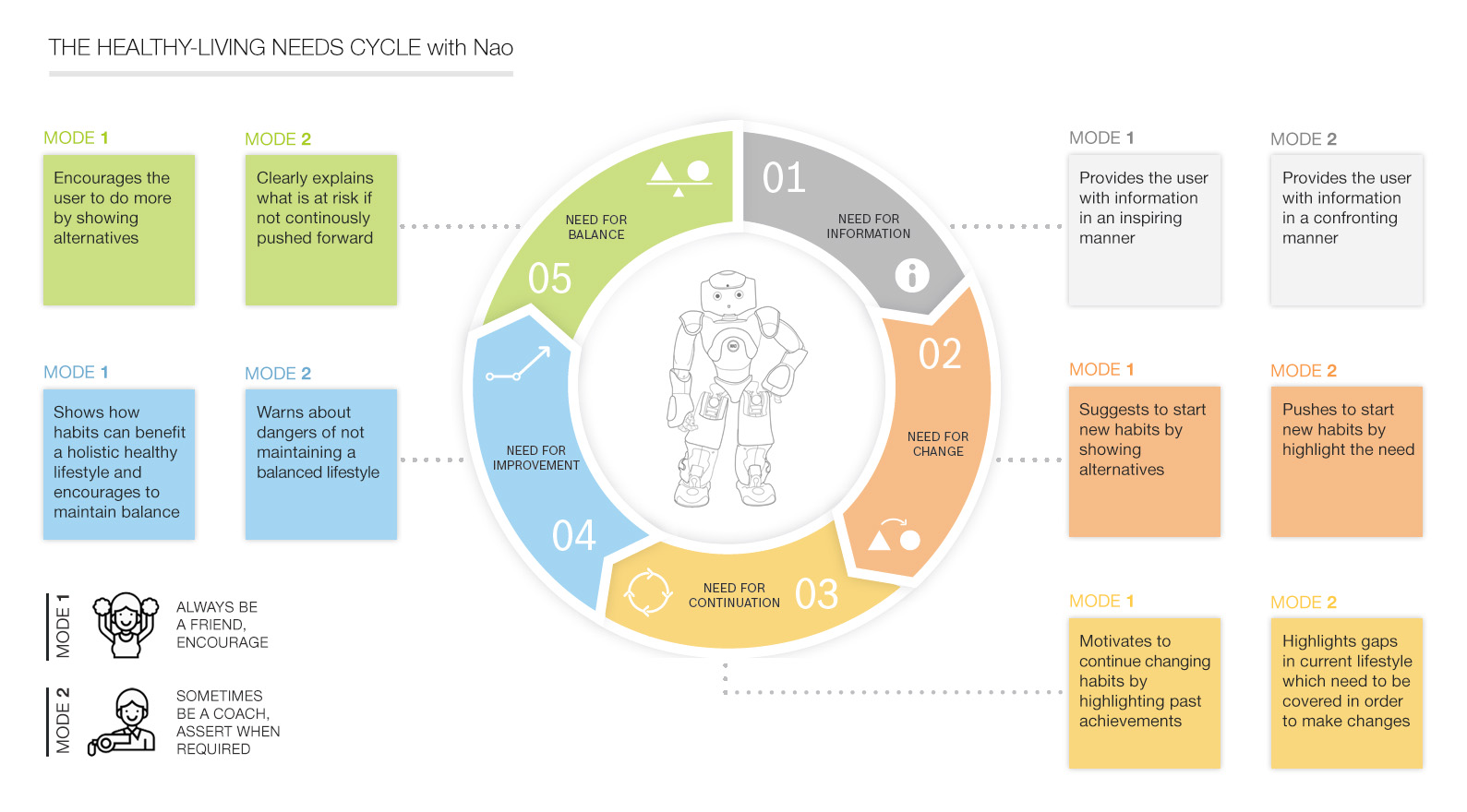
Healthy Living Needs Cycle
Discussing the current user needs and relating them to their past experiences and future motivations led to the creation of The Healthy-Living Needs Cycle:
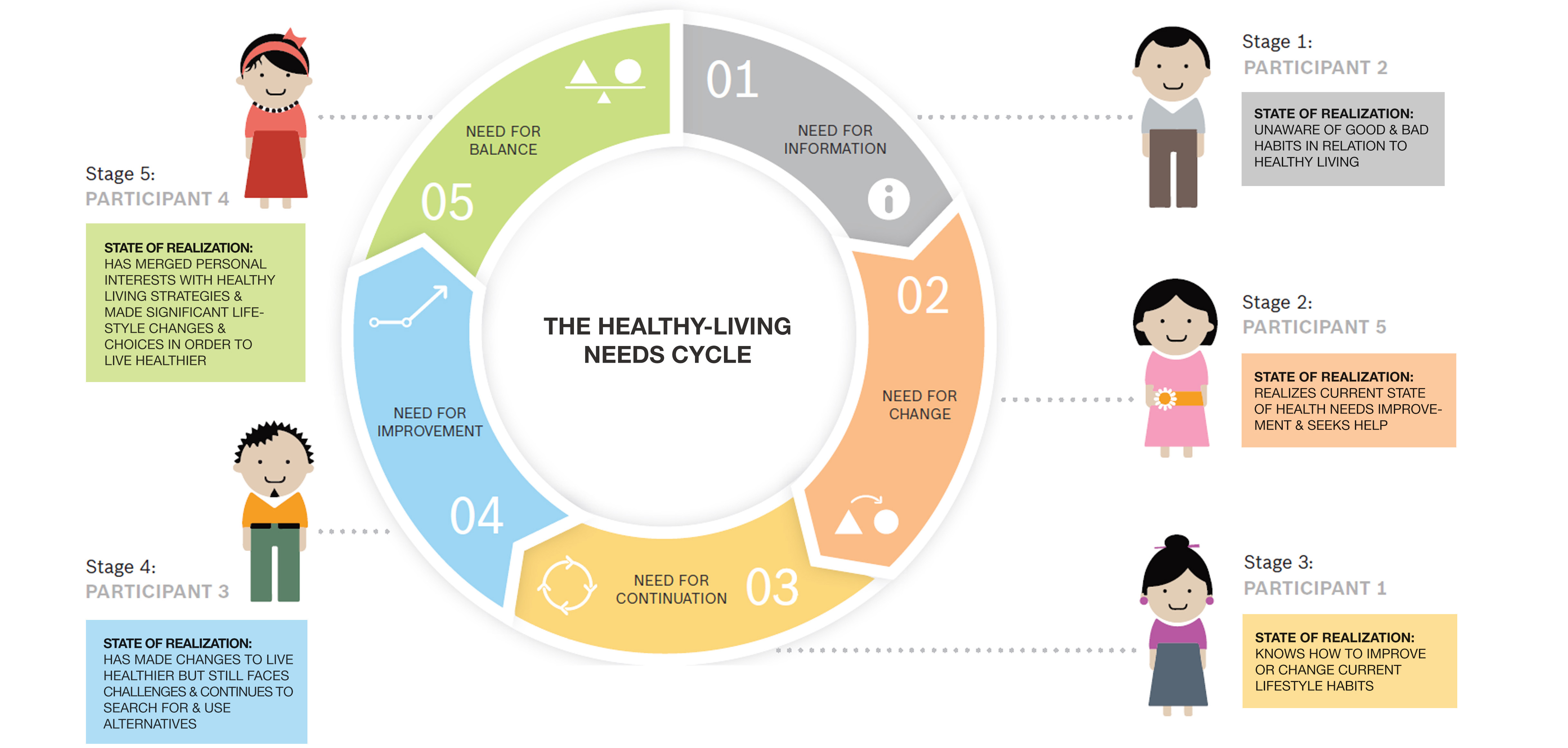
The analysis showed participants were at different stages of realization, needs, challenges & motivations for living a more healthy life. This helped build the 5 stages of the cycle.
Top Insights on Robot Interaction:
Participants felt more comfortable sharing private health information with a robot than a human.
- Recording and analyzing information relevant to user’s health is strongly desired.
- Connecting remotely to the robot when outside/ away from it is preferred so that health-related data is continuously recorded.
- Sharing companion robots with family members is acceptable.
- Being in control of the robot and the data it shares in the presence of others is considered vital.
“I know the robot won’t judge me when it knows my weight. It can also help me keep it in records for future purposes.”
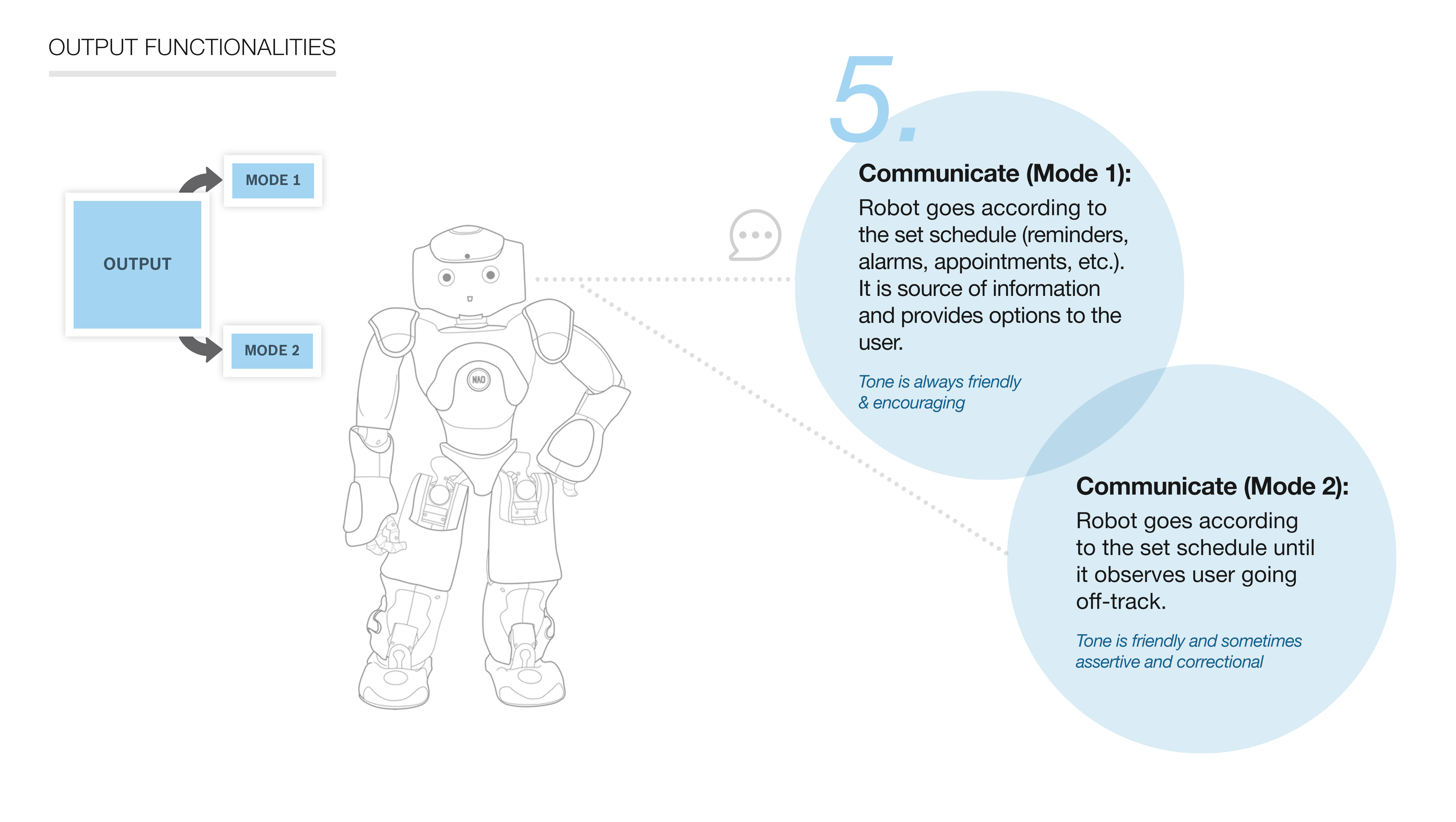
From the different communication styles of the robot (caregiver, friend, coach) that the participants were introduced to during the discussion, they preferred that the robot would communicate like a friend, and only when necessary communicate more strictly, like a coach.
Main Functions of Robot:
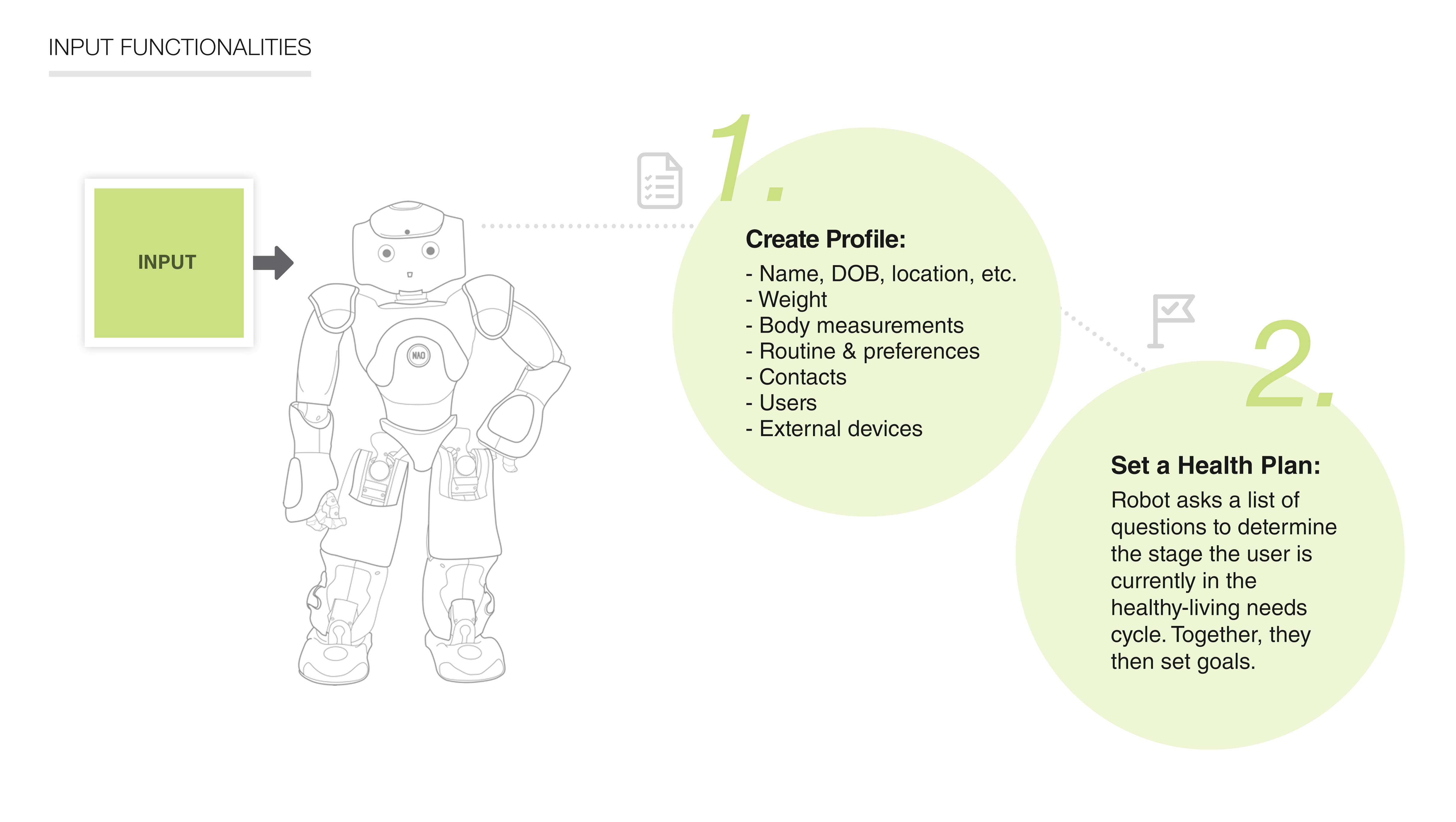
A basic flow of main functions for the robot was developed from analyzing the results:
(Hover on image to pause slideshow)
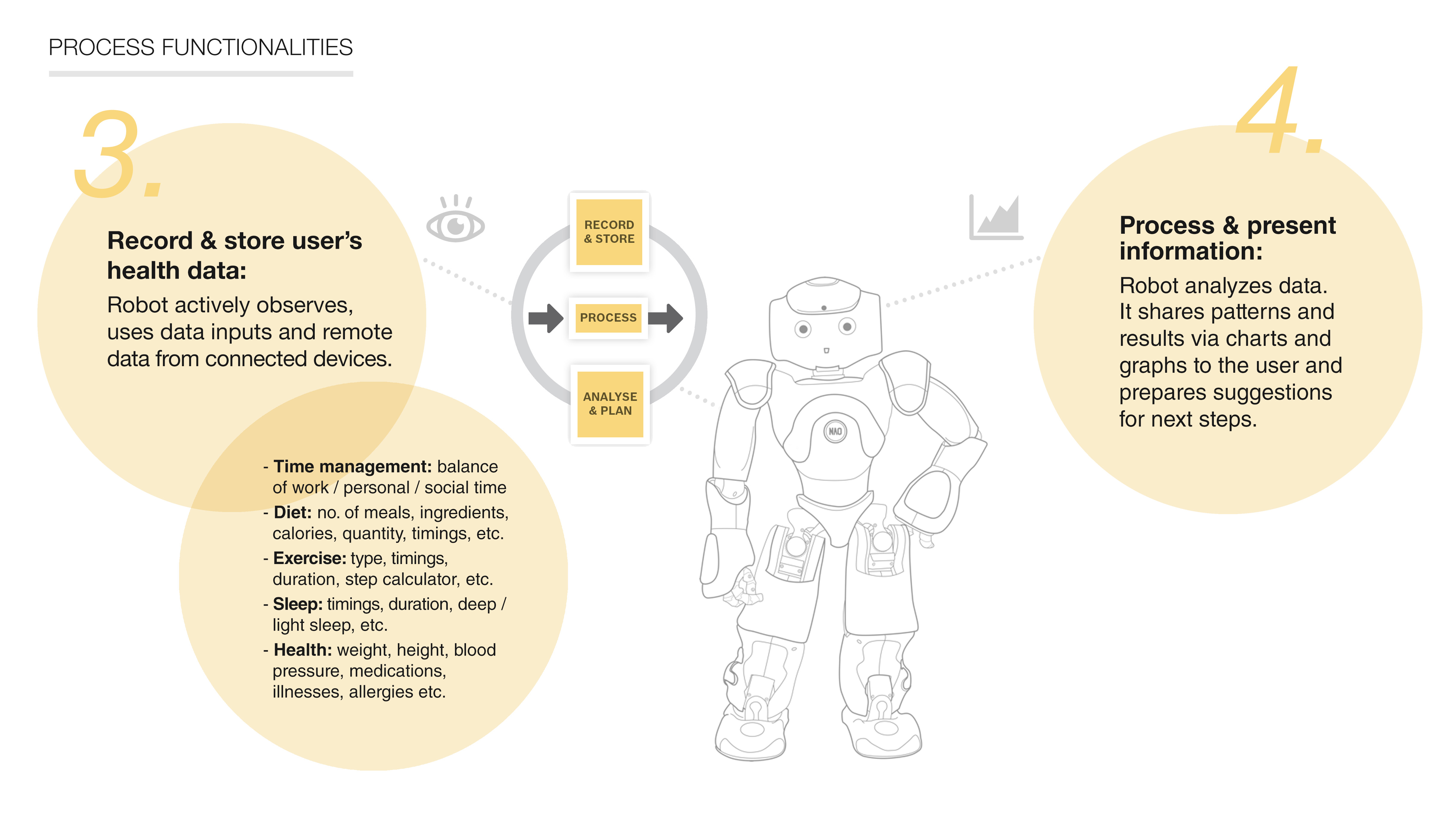
The Input function records and stores data, and helps assign a goal. The process function makes sense of data recorded over time, and keeps a check on the set goal.
The output function helps decide in which mode to communicate to the user.
Robot’s Role for Varying Needs:
Eventually, the two communication modes of the robot were mapped on to the 5 phases of The Healthy-living needs cycle. This helped provide an overview of how the robot can fulfill the varying needs of the users at different stages.