Overview
Our client explored the potential of a humanoid robot (Nao) as a companion for supporting healthy living. We were engaged to define its role, interaction model, and core functionalities through user testing conducted in Tokyo, Japan.
My Role
As part of a two-person team, I led the development of research scenarios, facilitated user sessions in Tokyo, and synthesised findings into actionable interaction frameworks and functional recommendations.
I translated qualitative insights into clear interaction principles and behavioural models that informed future robotic design decisions.
Research Approach
We focused on individuals seeking to improve health habits — including weight management, lifestyle balance, and sustained motivation.
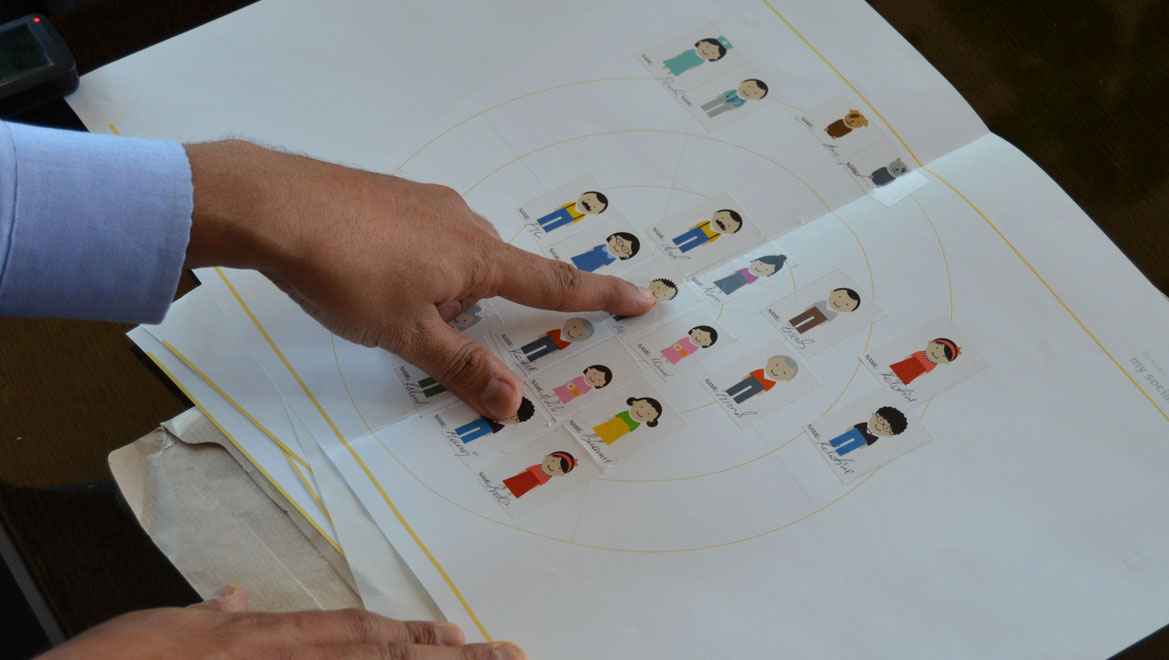
To deepen discussion quality, participants completed pre-session activities documenting daily routines, mapping social influence networks, and reflecting on motivations and barriers.






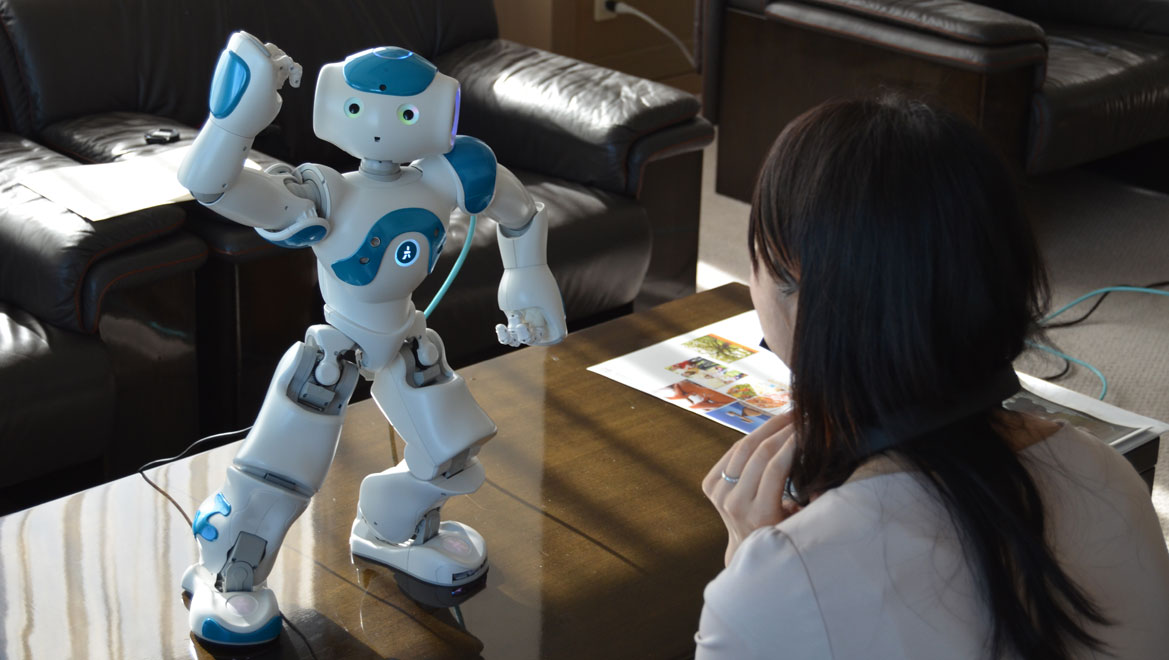
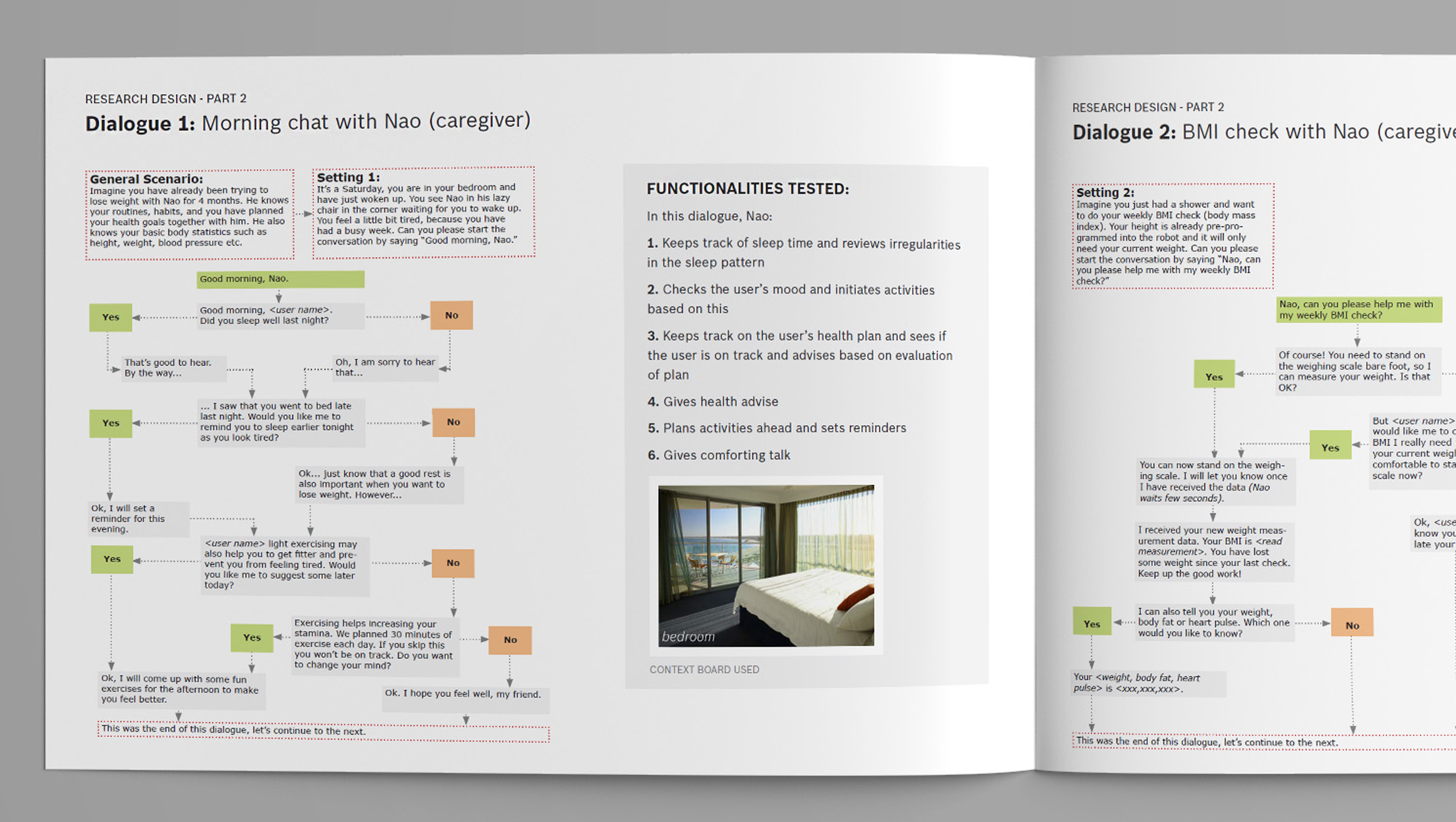
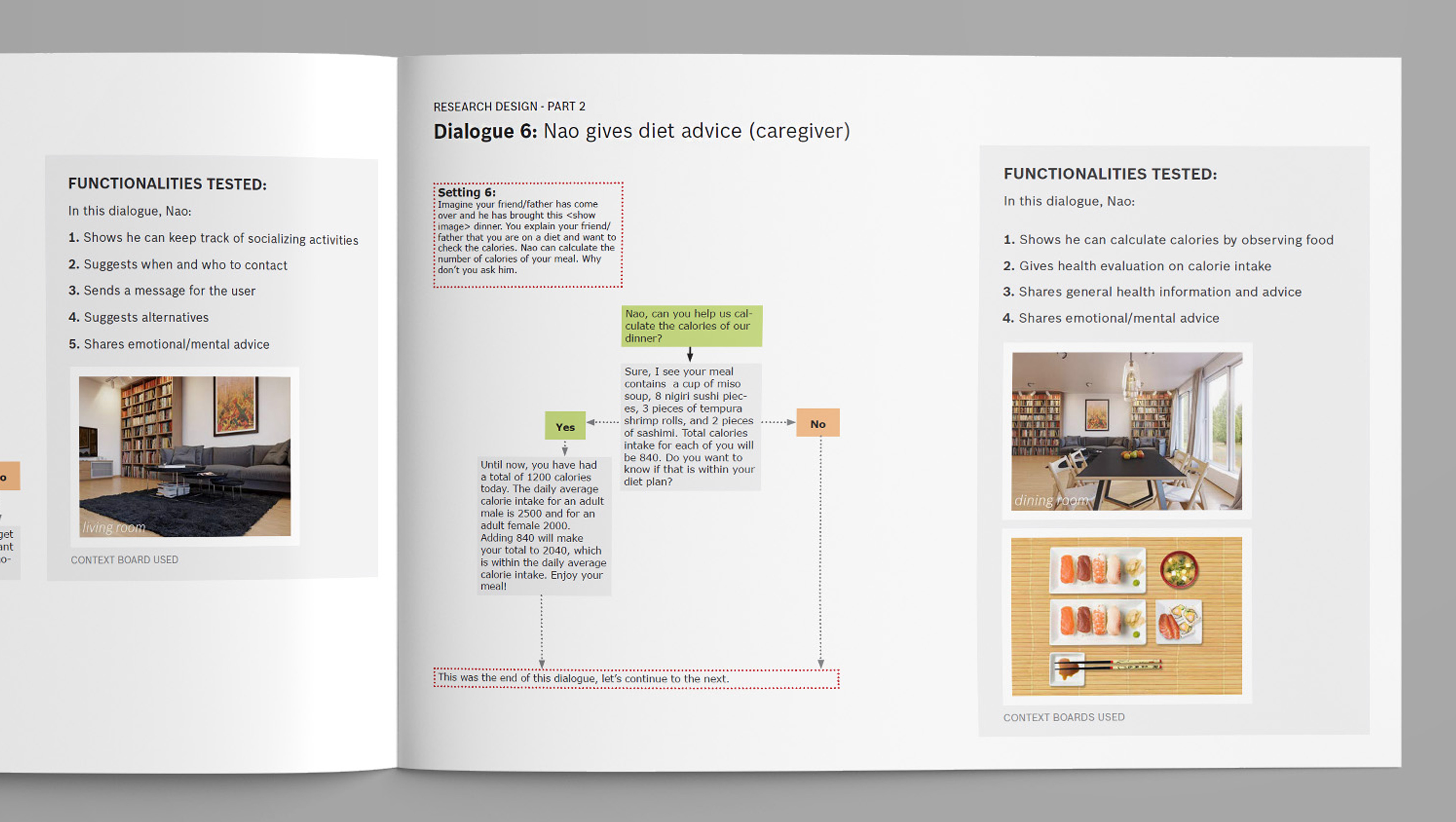
In-session research combined lifestyle exploration with live robot interaction scenarios, testing communication styles, functional expectations, and comfort levels around health data sharing.


Key Lifestyle Insights
Across participants, we identified recurring themes:
- Difficulty maintaining consistency due to work-life pressures
- Desire for structured guidance rather than generic advice
- Strong need for accountability beyond family influence
- Struggles with diet control as a primary behavioral barrier
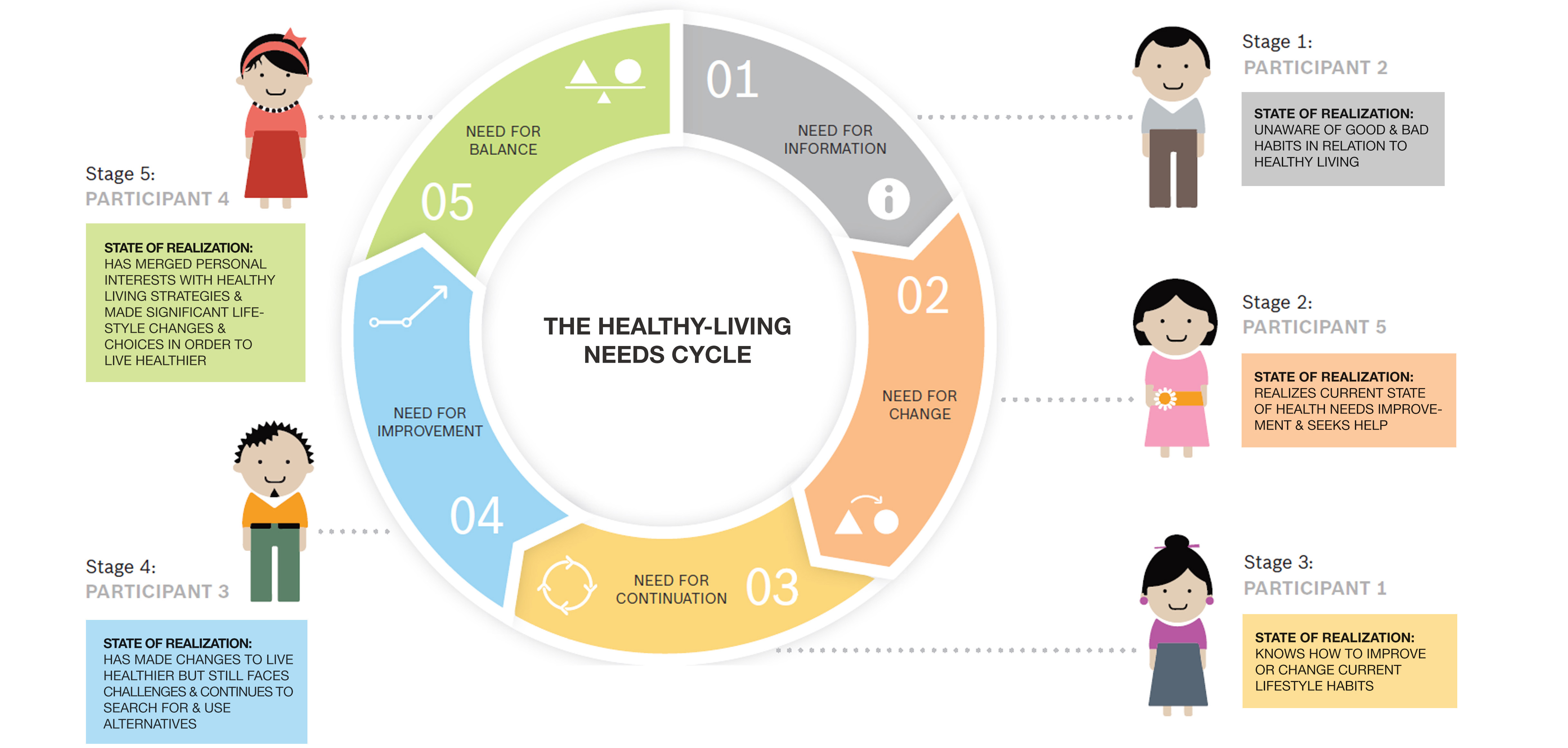
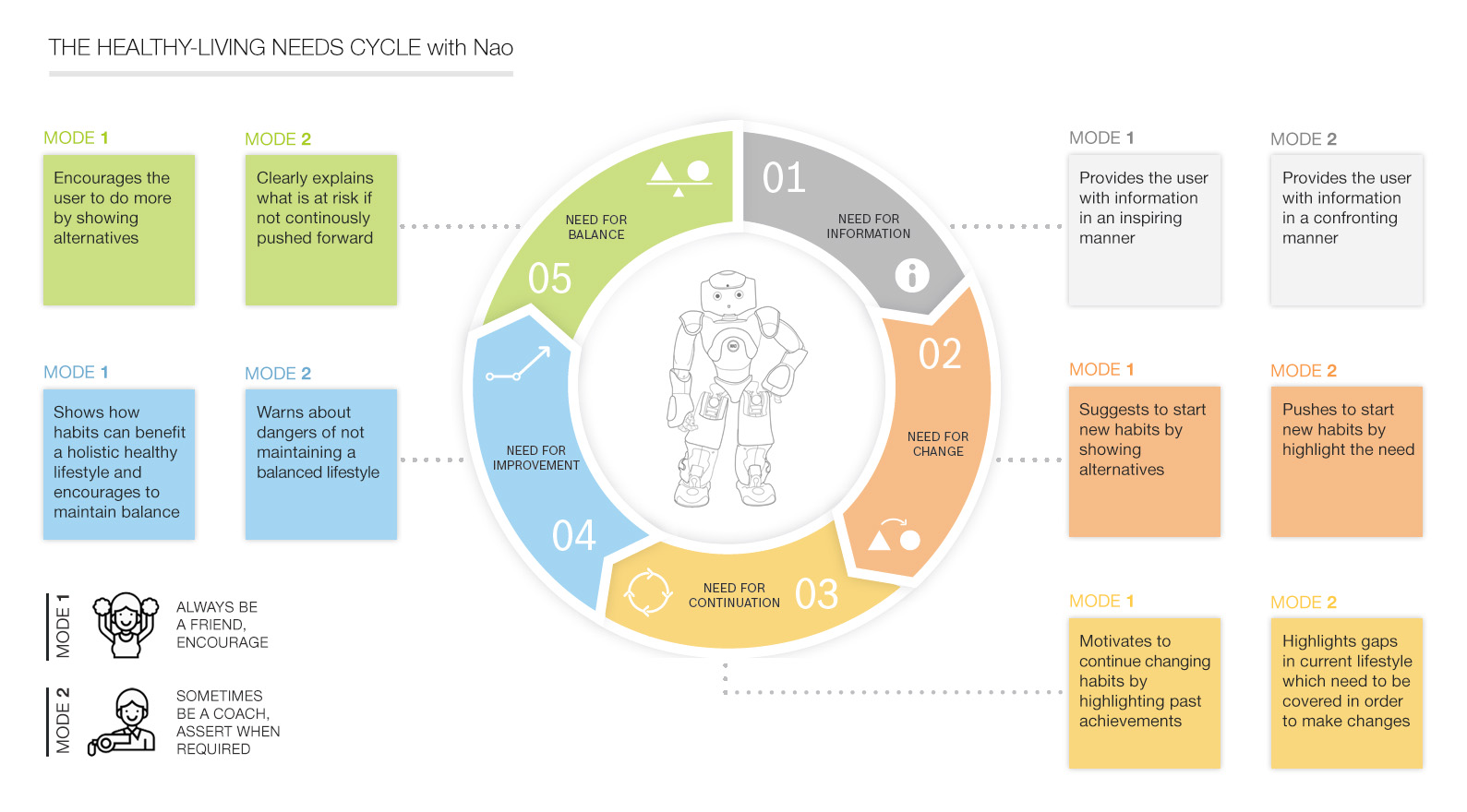
Participants were at varying readiness levels for change, leading to the creation of a Healthy Living Needs Cycle — a five-stage framework mapping user motivation and behavioral maturity.

Key Insights on Robot InteractionParticipants felt more comfortable sharing private health data with a robot than with a human — valuing continuous tracking, remote connectivity, and full control over data visibility. Their preferred communication style was a supportive friend that could escalate to coach when needed.
“I know the robot won’t judge me when it knows my weight. It can also help me keep it in records for future purposes.”
Design Implications
From these insights, we defined a simplified functional framework:
Input — Capture health data and goal setting
Process — Analyse trends and track progress
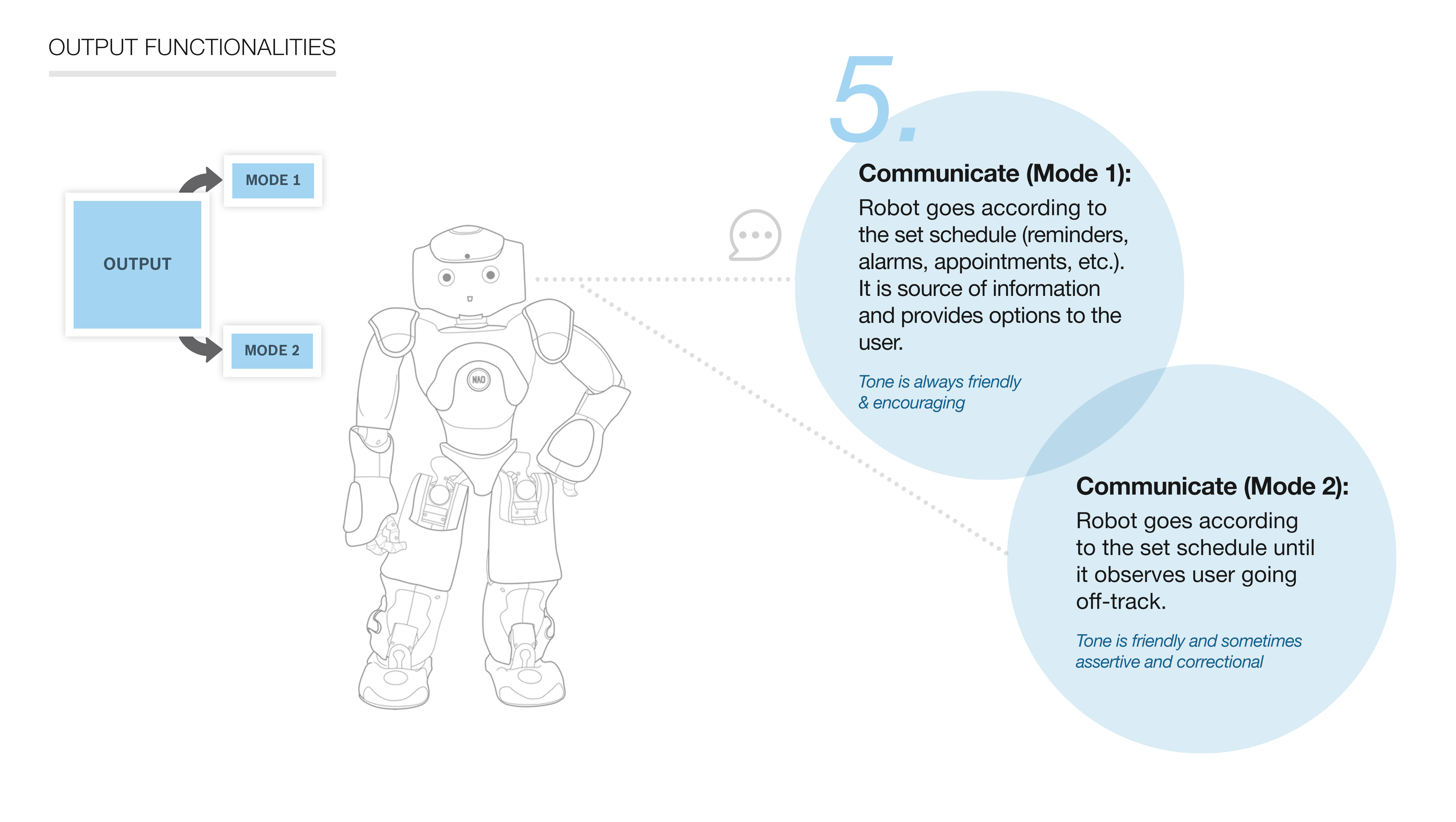
Output — Adjust communication style based on user stage
Communication modes were mapped against the five stages of the Healthy Living Needs Cycle, allowing the robot to adapt tone and guidance dynamically as users progressed.
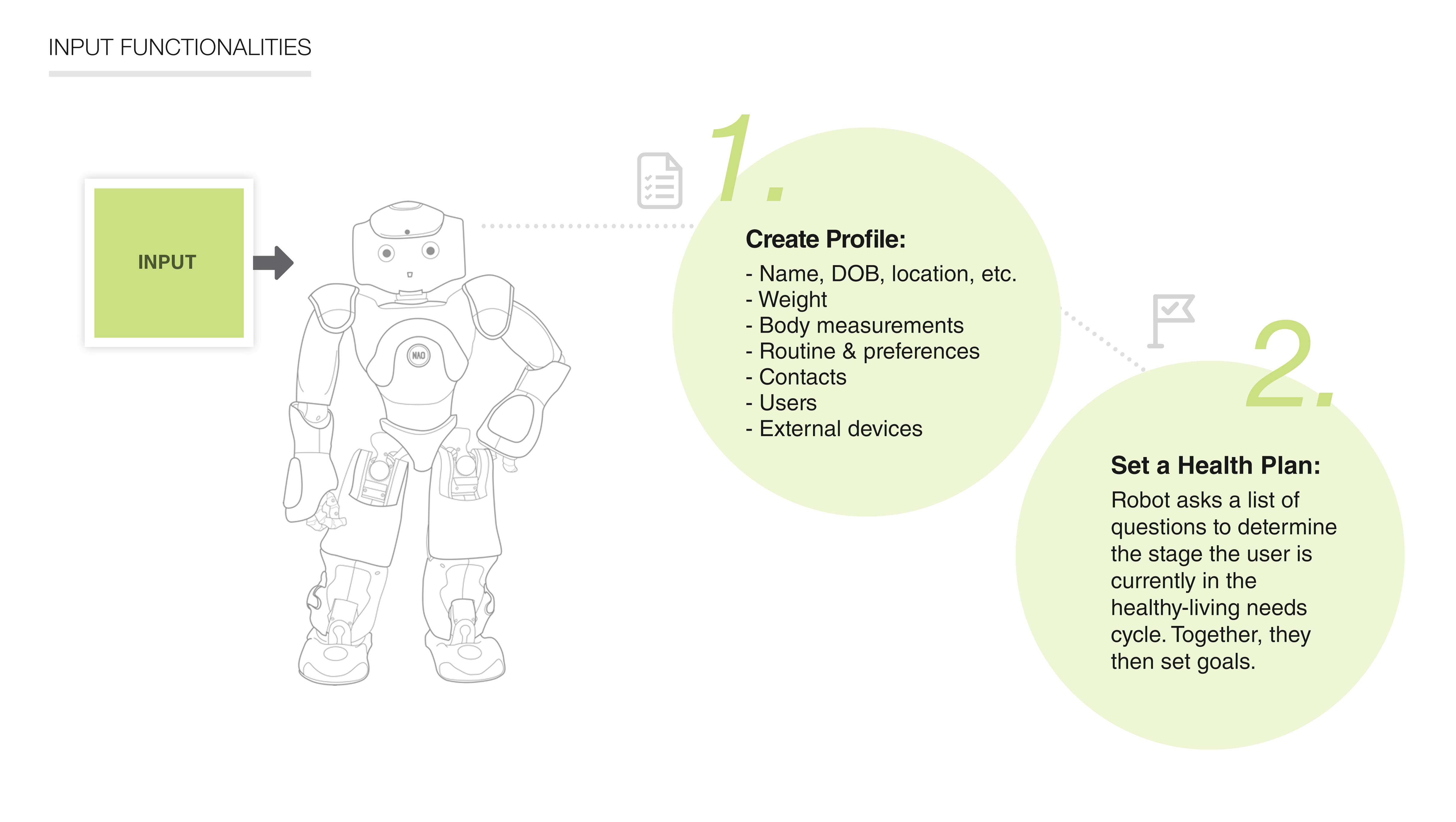
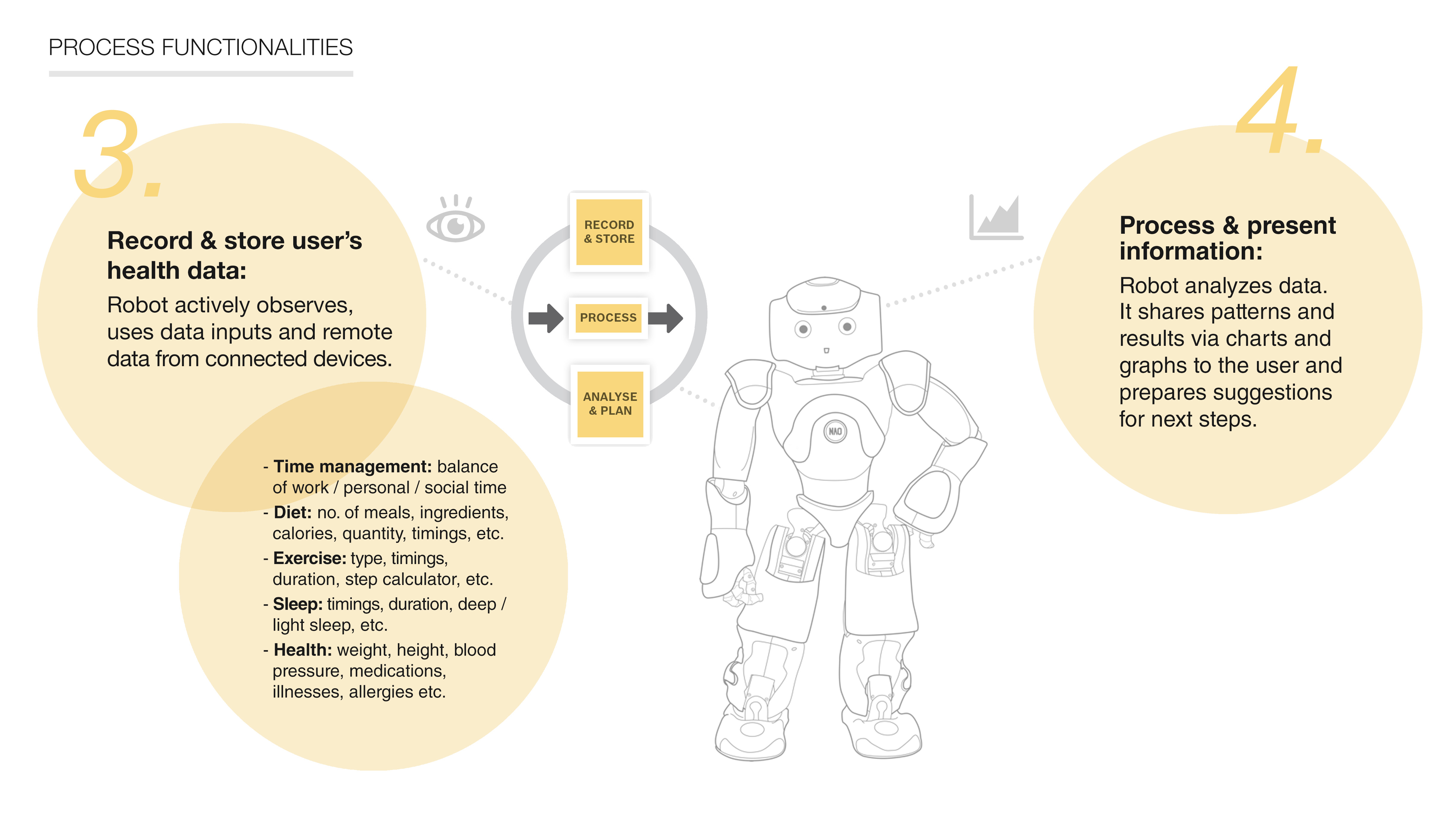
The Input function records and stores data, and helps assign a goal. The process function makes sense of data recorded over time, and keeps a check on the set goal.
The output function helps decide in which mode to communicate to the user.
Outcome
The research clarified both the emotional and functional role a companion robot could play in behavior change. Rather than positioning the robot as a caregiver or authority figure, findings supported a hybrid model — primarily a supportive peer, with contextual coaching.
This work clarified the interaction strategy and functional direction for the client’s health companion concept.